3D-Kollisionsdetektion
Dieser Artikel bietet eine Einführung in die verschiedenen Begrenzungsvolumen-Techniken, die zur Implementierung der Kollisionsdetektion in 3D-Umgebungen verwendet werden. Nachfolgende Artikel werden Implementierungen in spezifischen 3D-Bibliotheken behandeln.
Achsen-ausgerichtete Begrenzungsboxen
Wie bei der 2D-Kollisionsdetektion sind achsen-ausgerichtete Begrenzungsboxen (AABB) der schnellste Algorithmus, um zu bestimmen, ob sich zwei Spielelemente überschneiden oder nicht. Dies besteht darin, Spielelemente in einer nicht-gedrehten (also achsen-ausgerichteten) Box zu verpacken und die Positionen dieser Boxen im 3D-Koordinatenraum zu überprüfen, um festzustellen, ob sie sich überschneiden.
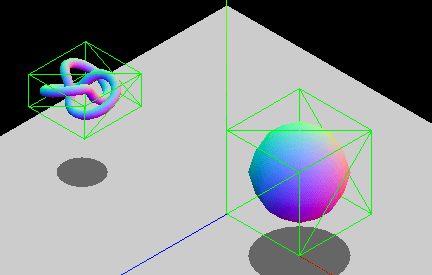
Die achsen-ausgerichtete Einschränkung besteht aus Leistungsgründen. Der Überlappungsbereich zwischen zwei nicht-gedrehten Boxen kann allein durch logische Vergleiche überprüft werden, während gedrehte Boxen zusätzliche trigonometrische Operationen erfordern, die langsamer zu berechnen sind. Wenn Sie Entitäten haben, die sich drehen, können Sie entweder die Abmessungen der Begrenzungsbox anpassen, damit sie das Objekt immer noch umschließt, oder Sie entscheiden sich für einen anderen Begrenzungsgeometrietyp, wie zum Beispiel Kugeln (die gegenüber Drehungen unveränderlich sind). Das animierte GIF unten zeigt ein grafisches Beispiel einer AABB, die ihre Größe anpasst, um die drehende Entität zu umschließen. Die Box ändert ständig ihre Dimensionen, um die in ihr enthaltene Entität passgenau zu umschließen.
Hinweis: Sehen Sie sich den Artikel Bounding Volumes with Three.js an, um eine praktische Implementierung dieser Technik zu sehen.
Punkt vs. AABB
Zu überprüfen, ob ein Punkt in einer AABB ist, ist ziemlich einfach — wir müssen nur überprüfen, ob die Koordinaten des Punktes innerhalb der AABB liegen, indem wir jede Achse separat betrachten. Wenn wir annehmen, dass Px, Py und Pz die Koordinaten des Punktes sind und BminX–BmaxX, BminY–BmaxY und BminZ–BmaxZ die Bereiche jeder Achse der AABB sind, können wir berechnen, ob eine Kollision zwischen den beiden aufgetreten ist, indem wir die folgende Formel verwenden:
Oder in JavaScript:
function isPointInsideAABB(point, box) {
return (
point.x >= box.minX &&
point.x <= box.maxX &&
point.y >= box.minY &&
point.y <= box.maxY &&
point.z >= box.minZ &&
point.z <= box.maxZ
);
}
AABB vs. AABB
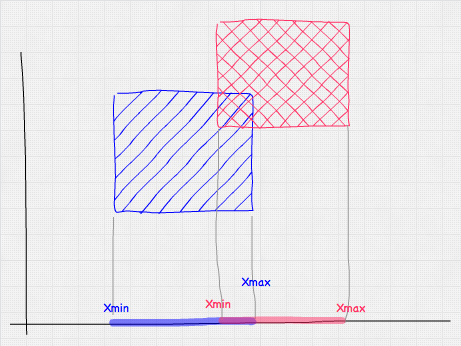
Zu überprüfen, ob eine AABB eine andere AABB schneidet, ist ähnlich wie der Punkt-Test. Wir müssen nur einen Test pro Achse durchführen, indem wir die Grenzen der Boxen verwenden. Das Diagramm unten zeigt den Test, den wir über die X-Achse durchführen würden — im Grunde, überlappen sich die Bereiche AminX–AmaxX und BminX–BmaxX?
Mathematisch würde das so aussehen:
Und in JavaScript würden wir dies verwenden:
function intersect(a, b) {
return (
a.minX <= b.maxX &&
a.maxX >= b.minX &&
a.minY <= b.maxY &&
a.maxY >= b.minY &&
a.minZ <= b.maxZ &&
a.maxZ >= b.minZ
);
}
Begrenzungssphären
Kollisionsdetektion mit Begrenzungssphären zu verwenden ist etwas komplexer als AABB, liefert jedoch immer noch schnelle Ergebnisse. Der Hauptvorteil von Sphären ist, dass sie invariant gegenüber Drehungen sind. Wenn die umfasste Entität rotiert, bleibt die Begrenzungssphäre gleich. Ihr Hauptnachteil ist, dass sie, sofern die umfasste Entität nicht tatsächlich kugelförmig ist, in der Regel schlecht passt (d.h. eine Person mit einer Begrenzungssphäre zu umschließen, wird viele Fehlalarme auslösen, während eine AABB eine bessere Übereinstimmung wäre).
Punkt vs. Sphäre
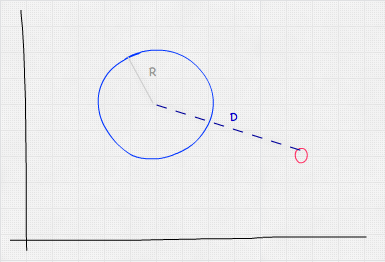
Um zu überprüfen, ob eine Sphäre einen Punkt enthält, müssen wir den Abstand zwischen dem Punkt und dem Zentrum der Sphäre berechnen. Wenn dieser Abstand kleiner oder gleich dem Radius der Sphäre ist, liegt der Punkt innerhalb der Sphäre.
Unter Berücksichtigung, dass der euklidische Abstand zwischen zwei Punkten A und B ist, würde unsere Formel für die Kollisionsdetektion von Punkt vs. Sphäre wie folgt aussehen:
Oder in JavaScript:
function isPointInsideSphere(point, sphere) {
// we are using multiplications because is faster than calling Math.pow
const distance = Math.sqrt(
(point.x - sphere.x) * (point.x - sphere.x) +
(point.y - sphere.y) * (point.y - sphere.y) +
(point.z - sphere.z) * (point.z - sphere.z),
);
return distance < sphere.radius;
}
Hinweis:
Der obige Code enthält eine Quadratwurzel, die kostspielig zu berechnen sein kann. Eine effektive Optimierung, um sie zu vermeiden, besteht darin, den quadrierten Abstand mit dem quadrierten Radius zu vergleichen, sodass die optimierte Gleichung stattdessen distanceSqr < sphere.radius * sphere.radius beinhalten würde.
Sphäre vs. Sphäre
Der Test Sphäre vs. Sphäre ähnelt dem Punkt vs. Sphäre-Test. Hier müssen wir überprüfen, ob der Abstand zwischen den Zentren der Sphären kleiner oder gleich der Summe ihrer Radien ist.
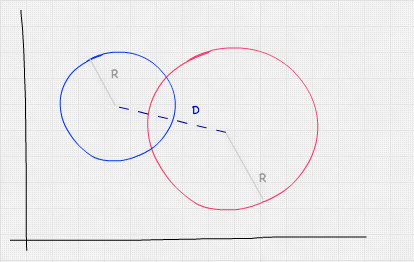
Mathematisch sieht das so aus:
Oder in JavaScript:
function intersect(sphere, other) {
// we are using multiplications because it's faster than calling Math.pow
const distance = Math.sqrt(
(sphere.x - other.x) * (sphere.x - other.x) +
(sphere.y - other.y) * (sphere.y - other.y) +
(sphere.z - other.z) * (sphere.z - other.z),
);
return distance < sphere.radius + other.radius;
}
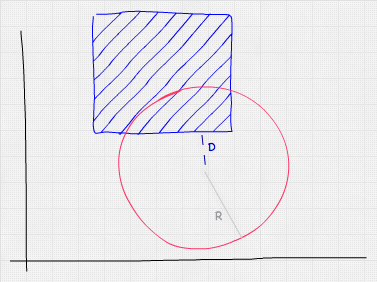
Sphäre vs. AABB
Zu testen, ob eine Sphäre und eine AABB kollidieren, ist etwas komplizierter, aber immer noch einfach und schnell. Ein logischer Ansatz wäre, jeden Scheitelpunkt der AABB zu überprüfen, indem für jeden ein Punkt-gegen-Sphäre-Test durchgeführt wird. Dies ist jedoch überflüssig — das Testen aller Scheitelpunkte ist unnötig, da wir lediglich den Abstand zwischen dem nächsten Punkt der AABB (nicht unbedingt ein Scheitelpunkt) und dem Zentrum der Sphäre berechnen müssen, um festzustellen, ob er kleiner oder gleich dem Radius der Sphäre ist. Diesen Wert können wir erhalten, indem wir das Zentrum der Sphäre auf die Grenzen der AABB beschränken.
In JavaScript würden wir diesen Test wie folgt durchführen:
function intersect(sphere, box) {
// get box closest point to sphere center by clamping
const x = Math.max(box.minX, Math.min(sphere.x, box.maxX));
const y = Math.max(box.minY, Math.min(sphere.y, box.maxY));
const z = Math.max(box.minZ, Math.min(sphere.z, box.maxZ));
// this is the same as isPointInsideSphere
const distance = Math.sqrt(
(x - sphere.x) * (x - sphere.x) +
(y - sphere.y) * (y - sphere.y) +
(z - sphere.z) * (z - sphere.z),
);
return distance < sphere.radius;
}
Verwendung einer Physik-Engine
3D-Physik-Engines bieten Algorithmen zur Kollisionsdetektion, die meist ebenfalls auf Begrenzungsvolumen basieren. Eine Physik-Engine funktioniert, indem sie einen physischen Körper erstellt, der normalerweise an eine visuelle Darstellung gebunden ist. Dieser Körper besitzt Eigenschaften wie Geschwindigkeit, Position, Rotation, Drehmoment usw., und auch eine physische Form. Diese Form wird in den Berechnungen zur Kollisionsdetektion berücksichtigt.
Wir haben eine Live-Demonstration zur Kollisionsdetektion (mit Quellcode) vorbereitet, die Sie sich ansehen können, um solche Techniken in Aktion zu sehen — diese verwendet die Open-Source-3D-Physik-Engine cannon.js.
Siehe auch
Verwandte Artikel auf MDN:
Externe Ressourcen:
- Simple intersection tests for games auf Game Developer
- Bounding volume auf Wikipedia